NCCL背景
PS-Worker/AllReduce变化
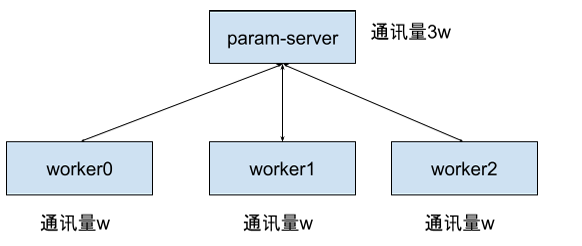 pserver模式下,每个worker将数据发送到param-server算平均梯度并同步,因此param-server通讯量是3w,随着训练规模的扩大,param-server会成为瓶颈。
pserver模式下,每个worker将数据发送到param-server算平均梯度并同步,因此param-server通讯量是3w,随着训练规模的扩大,param-server会成为瓶颈。
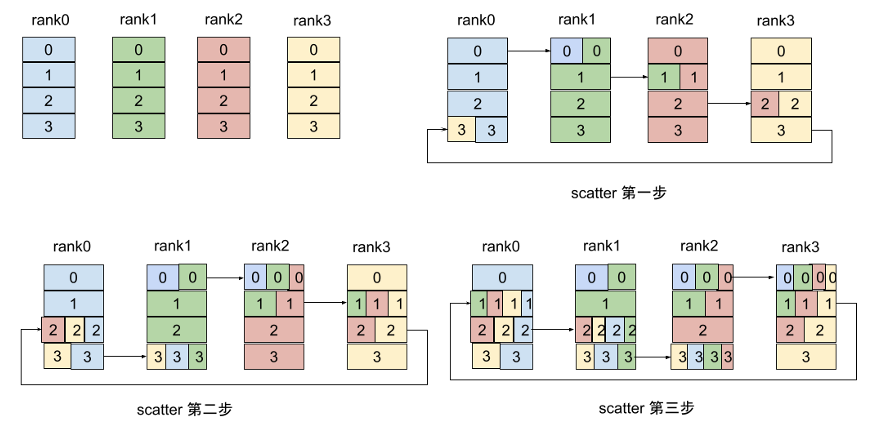
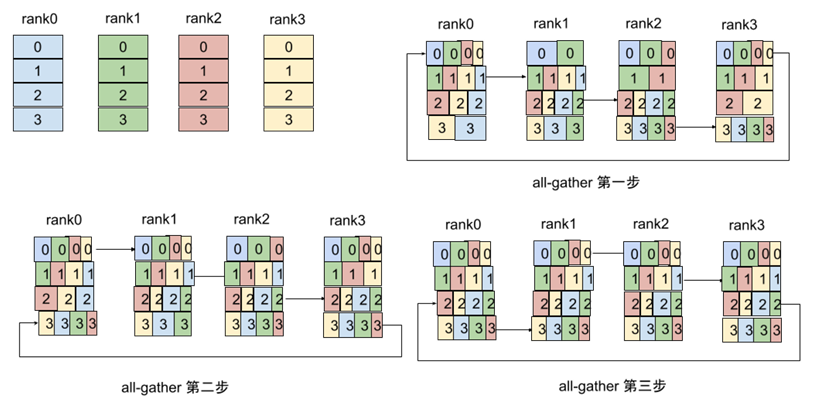 通过allreduce这种形式,每个节点只需向其他节点发送(n-1)次数据,每次发送w/n数据,重要的是每个节点发送的数据量相同。有了pserver到ring的allreduce,可以看到的变化是,从所有节点都向一个节点通讯,变成所有节点向其他节点发送等量的数据,结束了性能瓶颈。但是随着GPU数量的增多,环会变得很长,延迟会变高,从而影响带宽,然后有人提出了double-tree,从数据结构上来说是把list变成tree,将延迟从N变成lgN,将影响延迟的因素从环的长度变成树的高度。
通过allreduce这种形式,每个节点只需向其他节点发送(n-1)次数据,每次发送w/n数据,重要的是每个节点发送的数据量相同。有了pserver到ring的allreduce,可以看到的变化是,从所有节点都向一个节点通讯,变成所有节点向其他节点发送等量的数据,结束了性能瓶颈。但是随着GPU数量的增多,环会变得很长,延迟会变高,从而影响带宽,然后有人提出了double-tree,从数据结构上来说是把list变成tree,将延迟从N变成lgN,将影响延迟的因素从环的长度变成树的高度。
训练切分方式
一切为了加速训练
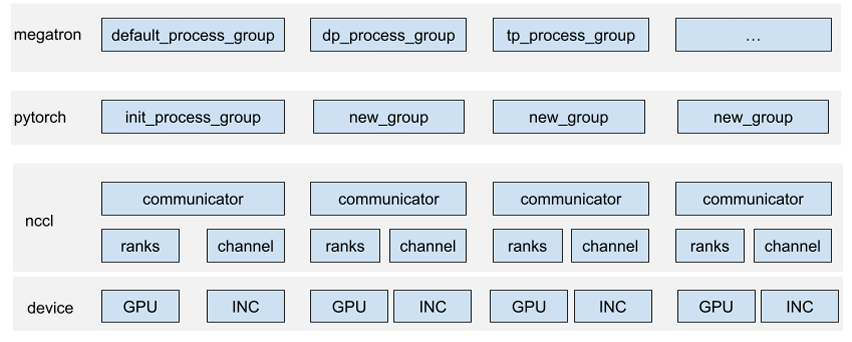
batch size大小会影响模型最终的准确性和训练过程的性能,而数据的batch size大小受到GPU内存限制,于是有人提出梯度累计,就是一次没法训练太多的数据,将多步的训练结果合成一步。然后后来随着模型的增大,GA也解决不了,出现了将完整的模型放到不同的GPU上,每个GPU训练的数据不同,这个就是数据并行;后来模型结构越来越大,导致一个GPU放不下完整的模型,就出现了TP/PP,一个是切分tensor,一个是切分layer。这里就出现了另外的问题,将tensor和layer切分之后,很多操作需要完整的模型,所以这里涉及到了通讯问题。具体怎么处理,torch的处理方式是给每个切分方式设置一个process-group,nccl的处理方式是将不同的切分方式单独做成一个communicator,在这个comm中该种切分方式不同rank之间通讯。
PP切分方式
 megatron/pytorch/nccl相关对象整体对应关系
megatron/pytorch/nccl相关对象整体对应关系
Rank概念以及rank如何确定
Rank的定义
rank一开始是在MPI中引入的,表示的是一个进程,这里表示给一组进程中的每个进程编号,现在的训练中由于一个训练进程运行在一张GPU上,所以一个rank也代表着一张GPU卡。
Rank如何确定
详细信息可以参考 nccl_rank选择。
切分以及rank分组例子
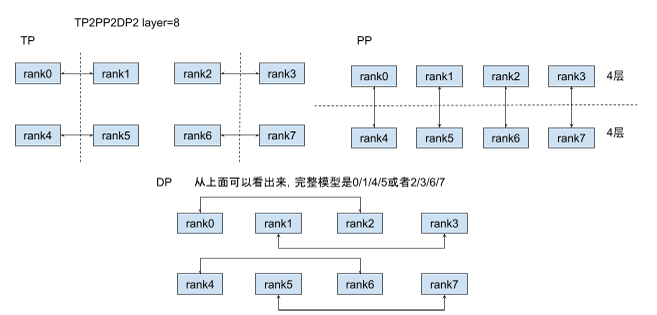 其中分到一组的rank会进行通讯,真实通讯的时候是按照rank编号来的,跟GPU号等其他的不直接相关。
拿TP来说,TP2表示将tensor分成两份,也就是说每两个GPU可以组成完整的tensor,对应8个rank的具体分组上,
其中分到一组的rank会进行通讯,真实通讯的时候是按照rank编号来的,跟GPU号等其他的不直接相关。
拿TP来说,TP2表示将tensor分成两份,也就是说每两个GPU可以组成完整的tensor,对应8个rank的具体分组上,[0,1], [2,3], [4,5], [6,7] 四组。
NCCL目标
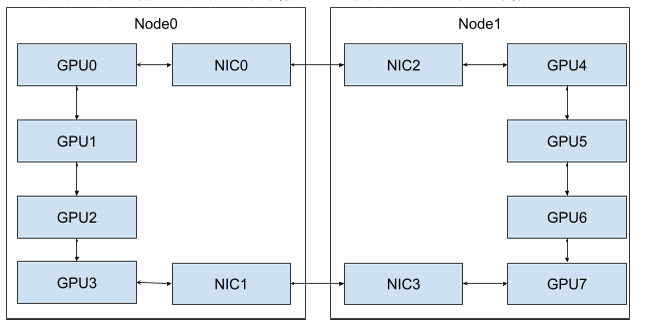
NCCL的是nvidia collective communications Library的缩写,是一个通讯库,目标是能完全利用设备带宽,提高设备之间的吞吐。
如下图所示,两个节点Node0/Node1,每个节点四张GPU两张网卡,当从Node0和Node1进行通讯的时候,如果把两张网卡都用起来并发发送数据那么目标就达到了,为了做到这一点,nccl将完全独立的物理设备建立数据通讯链路,具体做法是在通讯之前会先把数据发送的通道找出来,然后建立通讯,当进行数据通讯的时候,通过这些链路收发数据。
NCCL解析

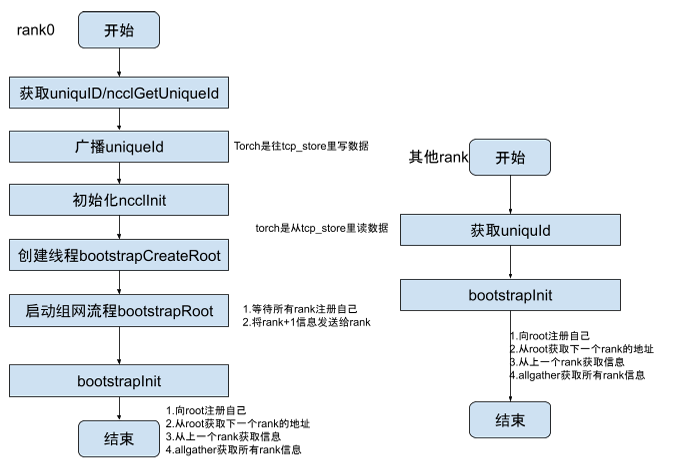
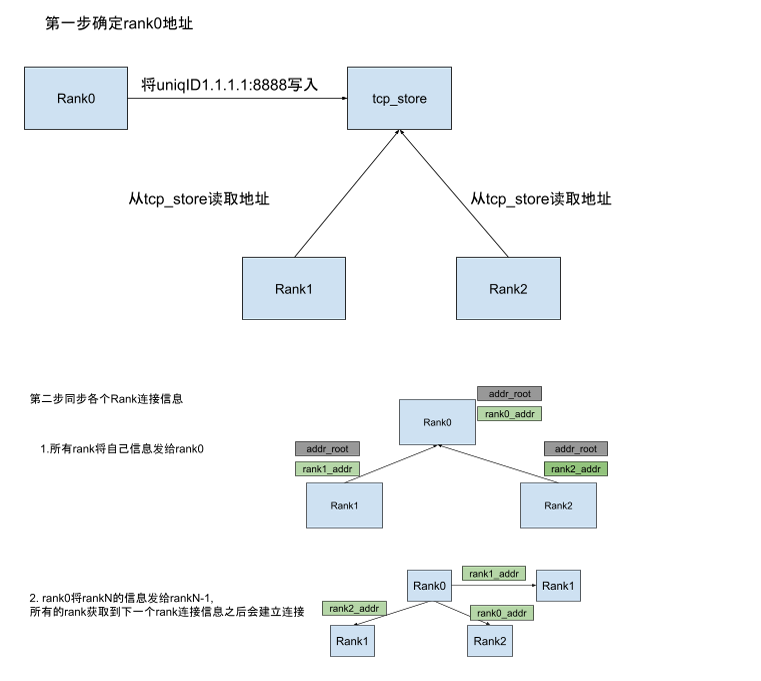
Bootstrap组网信息构建
这个是类似于服务注册发现的过程。
 其中这里的
其中这里的uniQueId其实就是master的连接地址。
topo构建和grap搜索
获取Topo
获取xml
这一步是将物理拓扑转换成一个树状结构。
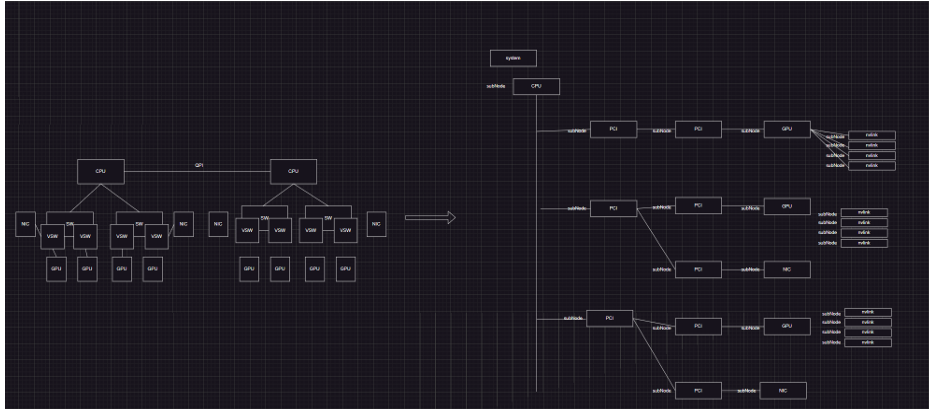 左边的是物理结构,右边是将物理结构转换成树状结构,一个node下面有subs变量表示子节点,parent表示父节点,由此串联成树状结构。
左边的是物理结构,右边是将物理结构转换成树状结构,一个node下面有subs变量表示子节点,parent表示父节点,由此串联成树状结构。
struct ncclXmlNode {
char name[MAX_STR_LEN+1];
struct {
char key[MAX_STR_LEN+1];
char value[MAX_STR_LEN+1];
} attrs[MAX_ATTR_COUNT+1]; // Need an extra one to consume extra params
int nAttrs;
int type;
struct ncclXmlNode* parent;
struct ncclXmlNode* subs[MAX_SUBS];
int nSubs;
};
struct ncclXml {
int maxIndex, maxNodes;
struct ncclXmlNode nodes[1];
};
其中每个设备都有对应的属性,放到key和value中,type表示设备类型。
构建topo
这一步是先构建一个无向图,之后通过广度优先遍历获取节点间带宽最大并且距离最短的路径,这里构建出来的路径后面搜索channel的时候会使用。
先来看下Node对象,topo就是不同设备之间是如何连接的,他们之间带宽多大;一个节点到另一个节点的最近距离;后面找channel的时候,每找到一条channel会把带宽剪掉,网卡没有这么做,因为网卡剪掉没法搜索了。通过上面获取到的xml逻辑结构树, 其中subs表示子节点,这里把子节点可以理解成连接到的设备,放到links字段中,path表示当前设备到其他设备的最近距离,最关键的path的搜索过程,得到path之后,会在后面channel搜索的时候用到。
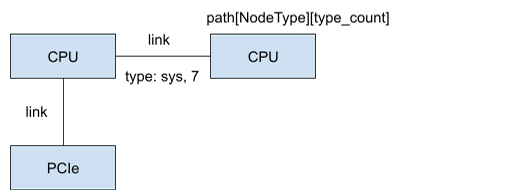 这里说下link类型:
这里说下link类型:
#define LINK_LOC 0
#define LINK_NVL 1
// Skipping 2 for PATH_NVB
#define LINK_PCI 3
// Skipping 4 for PATH_PXB
// Skipping 5 for PATH_PXN
// Skipping 6 for PATH_PHB
#define LINK_SYS 7
#define LINK_NET 8
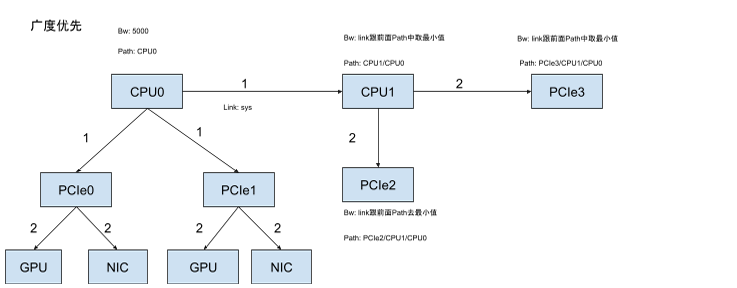 以CPU为例,从topo树中依次遍历相邻的设备,并将path信息写入对方的path中,当直接相邻的设备遍历完之后,会把这些节点放入待遍历的节点,然后依次遍历这些节点直接相连的设备,依次类推,这个是典型的广度优先遍历。
以CPU为例,从topo树中依次遍历相邻的设备,并将path信息写入对方的path中,当直接相邻的设备遍历完之后,会把这些节点放入待遍历的节点,然后依次遍历这些节点直接相连的设备,依次类推,这个是典型的广度优先遍历。
Path类型
// Local (myself)
#define PATH_LOC 0
// Connection traversing NVLink
#define PATH_NVL 1
// Connection through NVLink using an intermediate GPU
#define PATH_NVB 2
// Connection traversing at most a single PCIe bridge
#define PATH_PIX 3
// Connection traversing multiple PCIe bridges (without traversing the PCIe Host Bridge)
#define PATH_PXB 4
// Connection between a GPU and a NIC using an intermediate GPU. Used to enable rail-local, aggregated network send/recv operations.
#define PATH_PXN 5
// Connection traversing PCIe as well as a PCIe Host Bridge (typically the CPU)
#define PATH_PHB 6
// Connection traversing PCIe as well as the SMP interconnect between NUMA nodes (e.g., QPI/UPI)
#define PATH_SYS 7
// Connection through the network
#define PATH_NET 8
// Disconnected
#define PATH_DIS 9
Graph搜索
网卡选取
这里首先来看网卡选取,是因为机间的通讯,第一步是遍历GPU,获取最近的网卡放到数组中,之后遍历网卡数组,搜索channel,相关的方法是ncclTopoSelectNets。
逻辑:选择离GPU最近的网卡,当出现距离相同的网卡时,按照一定规则筛选,类似做了负载均衡,这里说负载均衡是因为跟channel有关,不同的channel选择不同的网卡。
for gpu 0-8:
for channel_num 0-max:
ncclTopoGetLocalNet
ncclTopoGetLocalNet 步骤:
- 把rank转换成index,这里的index是GPU在system中顺序的编号,而这里的rank对应的是Rank
ncclTopoGetLocal, 获取离GPU最近的网卡- 获取网卡数量
- 获取当前GPU到其他网卡的Path信息,
system->nodes[type].nodes[index].paths[resultType] - for 网卡0-4:
- 从path中找到四个网卡中bw最大并且跳数最少的,如果带宽跟跳数相同,就把多个网卡都放进去,否则只保留一个
ncclTopoGetLocal,获取离上一步中获取的第一张网卡最近的所有GPU- 这里将当前GPU的设备编号作为网卡编号net
- 负载均衡
if (isPow2(localNetCount)) net = mirrorBits(net, localNetCount); net += channelId%(DIVUP(localNetCount,localGpuCount));这里获取到的网卡数除以获取到的GPU数并向上取整获得数据A,然后拿channelId%A,获取网卡
- 拿上一步获取到的网卡号
%获取到的网卡数量,作为最终选择的网卡
总体逻辑
入口是在ncclTopoCompute, 它的目标是寻找节点内的最大并发路径数,并且选择最大的带宽,主体逻辑是在ncclTopoSearchRec,先看下外层的逻辑,然后里面的逻辑是一个有条件的暴力搜索,像贪心算法。
如果第一遍ncclTopoSearchRec没有搜到合适的channel,就降低要求,再去搜索,直到搜索到一个解决方案,如果找到一个解决方案,尝试寻找带宽更大的解决方案。
Ring搜索
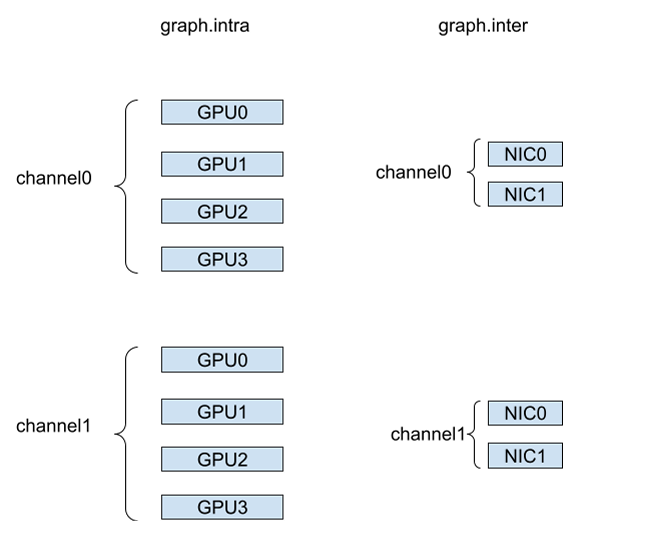
为了好理解,我们先看下数据结构,这里主要有两个,inter和intra,inter表示机间通讯,里面放的是网卡,intra表示机内通讯,里面放的是GPU; 然后整体通讯就是把inter和intra连起来构成。
 搜索过程 (机内)
对于ring来说,搜索的目标是每一个channel由进出节点的两张网卡+选择的GPU构成:
搜索过程 (机内)
对于ring来说,搜索的目标是每一个channel由进出节点的两张网卡+选择的GPU构成:
for i in nets遍历所有网卡 a. 将当前网卡放入graph->inter[graph->nChannels*2], 就是作为当前channel的起始网卡 b. 对于第一个channel,找到带宽最大的GPU,从这个GPU开始搜索 c. 对于其他channel,通过重放获取GPU,然后指定选择下一个GPU策略是重放,也进行路径搜索
之后是ncclopoSearchTryGpu到ncclTopoSearchRecGpu,直接看后者,前者只是后者添加了增减带宽处理,核心在后面。
ncclTopoSearchRecGpu,这个方法是遍历所有的GPU,选择合适的GPU放入graph->intra,之后选择合适的网卡放入graph->inter,这里网卡是结尾,开头是在上面一开始遍历网卡的地方。
方法解析:
If step == gpu_count:// 当走到步数等于gpu数量时,这个时候需要结算了graph->nChannels++;ncclTopoCompareGraphs(graph, tmp);If tmp是一个更好的channel:- 将tmp复制到graph;
If graph->nChannels < graph->maxChannels:ncclTopoSearchRec; // 继续递归搜索channel
graph->nChannels--;// 暴力搜索
将当前gpu放到graph->intra;// 这里是核心的一步If step == backToNet:// 当步数等于gpu数量-1时,说明GPU已经选完了需要回到网卡,这里要选择网卡- 以当前GPU作为起点,找到所有的网卡,调用的是前面的是
ncclTopoSelectNets - 遍历所有的网卡
a. 如果当前GPU到某个网卡的带宽满足要求,就将该网卡放入
graph->inter[nChannels*2+1],开始搜索下一个channel i. 需要注意的是,带宽扣减在ncclTopoFollowPath/followPath方法里 b. 如果没有找到当前GPU满足带宽要求的网卡,本次搜索结束,回退
- 以当前GPU作为起点,找到所有的网卡,调用的是前面的是
If step < system->nodes[GPU].count-1:// 这里是继续查找下一个GPUIf 按照PCI顺序:- 下一个GPU就是当前的step+1;
If 选择重放:- 从
graph->intra中获取上一次channel的下一步的GPU编号
- 从
else 常规情况:ncclTopoSearchNextGpuSort,该方法是对GPU排序,作为下一步的GPU来选择- 根据当前GPU的paths,获取其他GPU到当前GPU的距离+带宽等信息,如果下一步是网卡,还要加上网卡的带宽
- 根据机间网卡带宽,机间Pci带宽,机间跳数,机内带宽,机内跳数,GPU编号等条件对GPU排序
- 按照排好的顺序将GPU放入next数组
- 如果系统中存在nvswitch,优先选择跟当前GPU序号相连的两张卡
For i in gpu_count:对后续的每一个GPU进行搜索尝试ncclTopoSearchTryGpu,这个方法获取对应的路径设备,之后会调用ncclTopoSearchRecGpu,暴力递归
搜索过程 (机间)
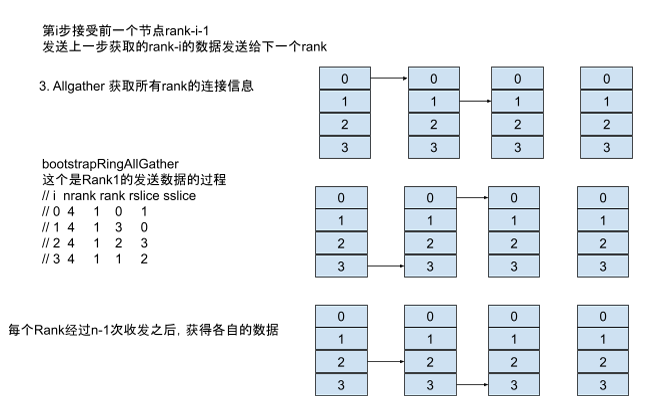
从实现上来说,一共三步,将graph->intra放入ncclTopoRank; allgather获取所有节点的graph信息; 将所有设备连接。
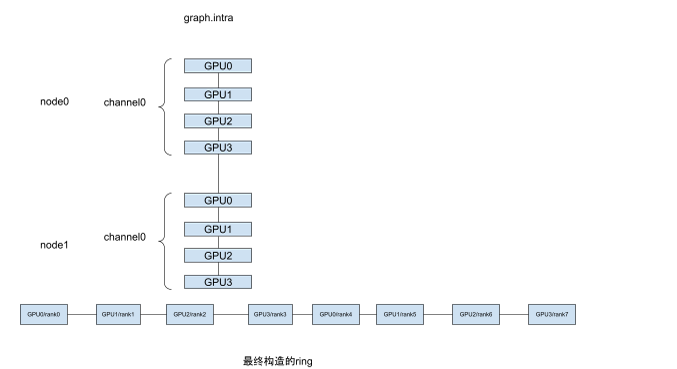 Ring的机间起始比较简单,就是把每个节点的channel相连;
至于为什么非要搞prev/next,这个起始跟通讯有关系,因为ring通讯的时候就是就上一个rank和下一个rank通讯,是为了后面通讯收发数据方便。
至于数据发送这一块,我们这一版先不写,后面再补充;看上去
Ring的机间起始比较简单,就是把每个节点的channel相连;
至于为什么非要搞prev/next,这个起始跟通讯有关系,因为ring通讯的时候就是就上一个rank和下一个rank通讯,是为了后面通讯收发数据方便。
至于数据发送这一块,我们这一版先不写,后面再补充;看上去graph->inter这里没有使用,在构建send/recv连接的时候,会选择使用的网卡,那个时候会用到,具体在ncclTopoGetNetDev。
Tree搜索
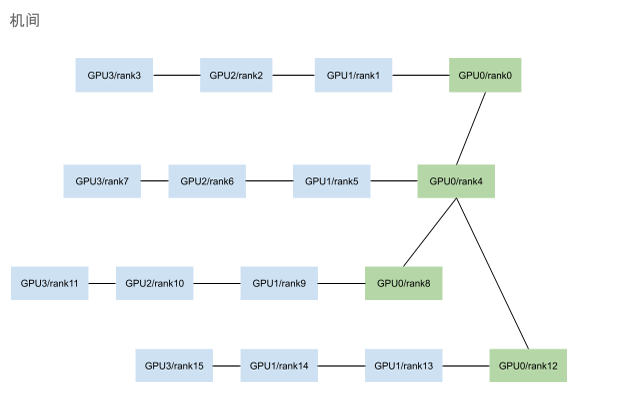
tree前面提到过为了降低GPU规模带来的延迟增加问题,改用double-tree,目前的实现是相当于每个机器相当于tree中的一个节点(对于简单的tree可以这么理解),节点内也是一条链,至于为什么这么实现,猜想是节点内带宽较大,延迟不会超过节点间,目前这种实现比较简单,看官方的测试效果也不错。
机内
tree分为三种NCCL_TOPO_PATTERN_TREE / NCCL_TOPO_PATTERN_SPLIT_TREE / NCCL_TOPO_PATTERN_BALANCED_TREE。
这里先讲最简单的NCCL_TOPO_PATTERN_TREE,他跟ring的机内搜索差不多,其实三种都差不多,差别都是在选择网卡上,跟ring处理差别是在转换成topoRank的时候,才会展现出tree的特性。
NCCL_TOPO_PATTERN_TREE要求进出网卡要是同一个。
机间
通讯时如何选择Channel
通过带宽计算选择带宽最好的channel,这里有两个纬度,一个是通讯原语,一个是算法,对于不同的通讯原语会根据带宽选择不同的算法,举个例子,tree只是实现了allreduce,也就是说就算tree性能好,很多操作无法使用。
目前通讯原语和算法支持统计:
| 通讯原语/算法 | ring | tree |
|---|---|---|
| send | ✓ | ✘ |
| recv | ✓ | ✘ |
| reduceScatter | ✓ | ✘ |
| reduce | ✓ | ✘ |
| broadcast | ✓ | ✘ |
| allreduce | ✓ | ✓ |
| allgather | ✓ | ✘ |
带宽计算:
ncclResult_t ncclTopoGetAlgoTime(struct ncclInfo* info, int algorithm, int protocol, int numPipeOps, float* time) {
float bw = info->comm->bandwidths[info->coll][algorithm][protocol];
float lat = info->comm->latencies[info->coll][algorithm][protocol];
if (bw == 0) {
*time = -1.0; return ncclSuccess;
}
int logSize = log2i(info->nBytes>>6);
if (algorithm == NCCL_ALGO_TREE && logSize < 23) bw *= treeCorrectionFactor[protocol][logSize];
if (info->nChannels != 0) bw = bw / info->comm->nChannels * info->nChannels;
if (algorithm == NCCL_ALGO_RING && protocol == NCCL_PROTO_SIMPLE && info->comm->nNodes > 1
&& info->coll == ncclFuncAllReduce && info->nBytes/(info->comm->nChannels*info->comm->nRanks) >= 64) {
lat *= info->comm->minCompCap < 80 ? 1.9 : 1.4; // Plateau effect of ring
}
// Tree pipelining saves latency in aggregation cases
int latCount = algorithm == NCCL_ALGO_RING ? numPipeOps : DIVUP(numPipeOps, NCCL_MAX_WORK_ELEMENTS);
*time = lat * latCount + (info->nBytes) / (1000 * bw);
return ncclSuccess;
}